About me
I’m a Ph. D candidate in Robotics and Autonomous Systems at the Hong Kong University of Science and Technology (HKUST), where I am supervised by Prof. Jun Ma. Before HKUST, I was a visiting student at Yale Grab lab, where I typically worked with Prof. Yifan.Zhu. My research interest lie in the how to leverage physics-informed knowledge in robotics manipulation, where typically simulation can be widely used.
Contact: xiang7976@gmail.com
Publications
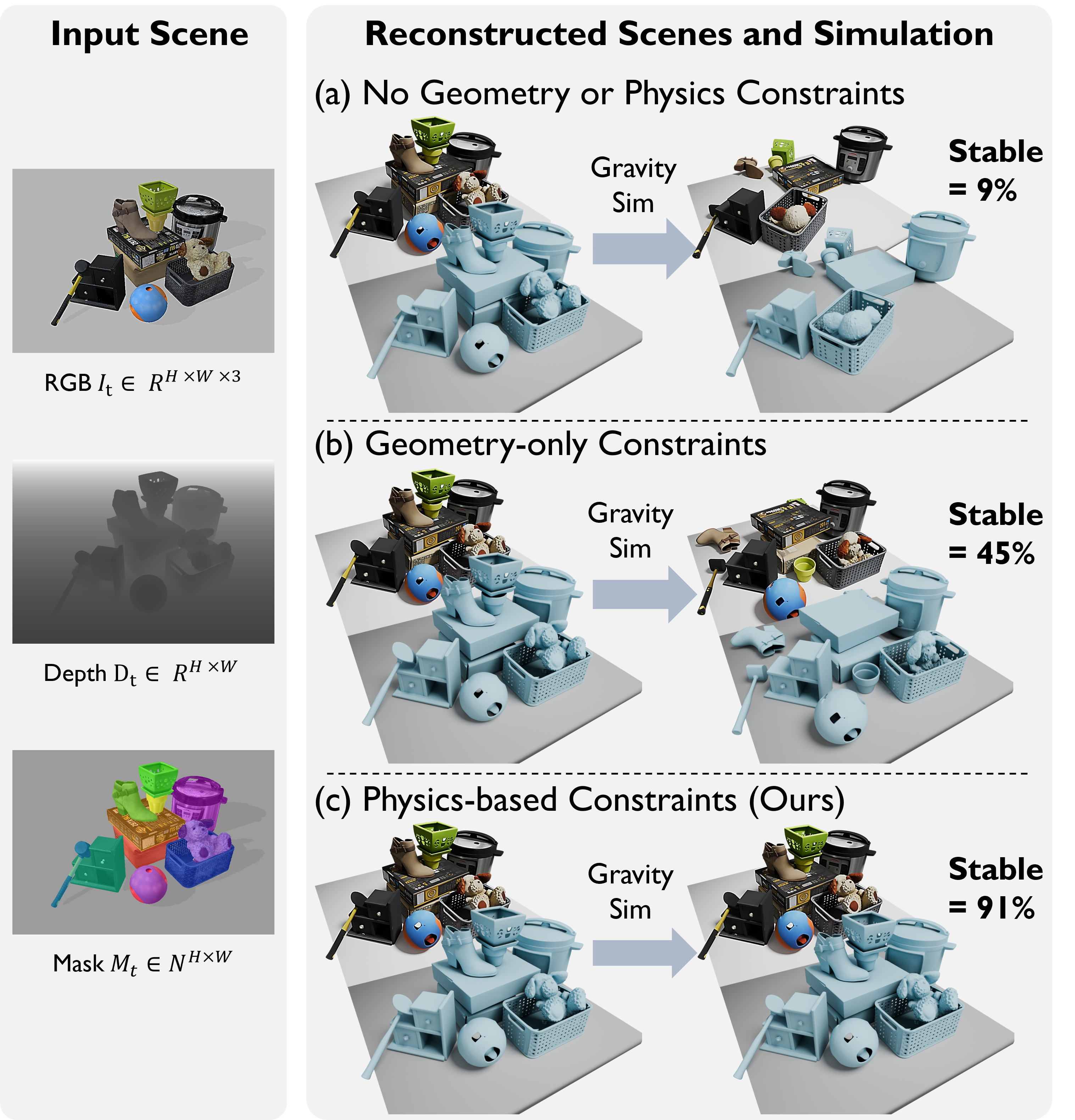
"Real-to-Sim for Highly Cluttered Environments via Physics-Consistent Inter-Object Reasoning"
Tianyi Xiang, Jiahang Cao, Sikai Guo, Guoyang Zhao, Andrew F. Luo,and Jun Ma
IEEE Robotics and Automation Letters (IEEE RA-L, 2026).

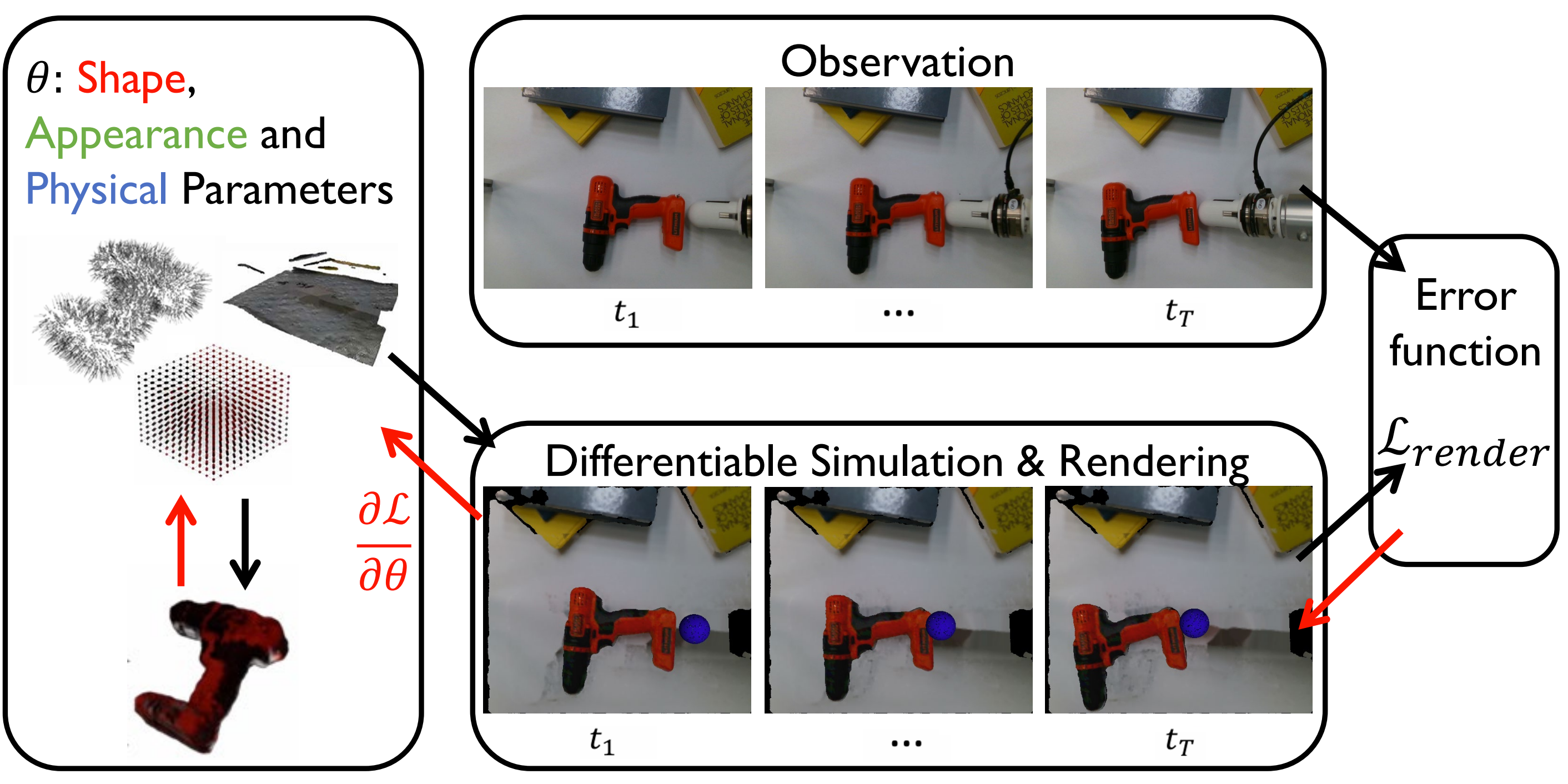
"One-Shot Real-to-Sim via End-to-End Differentiable Simulation and Rendering"
Yifan Zhu, Tianyi Xiang, Aaron Dollar, Zherong Pan
IEEE Robotics and Automation Letters (IEEE RA-L, 2025).
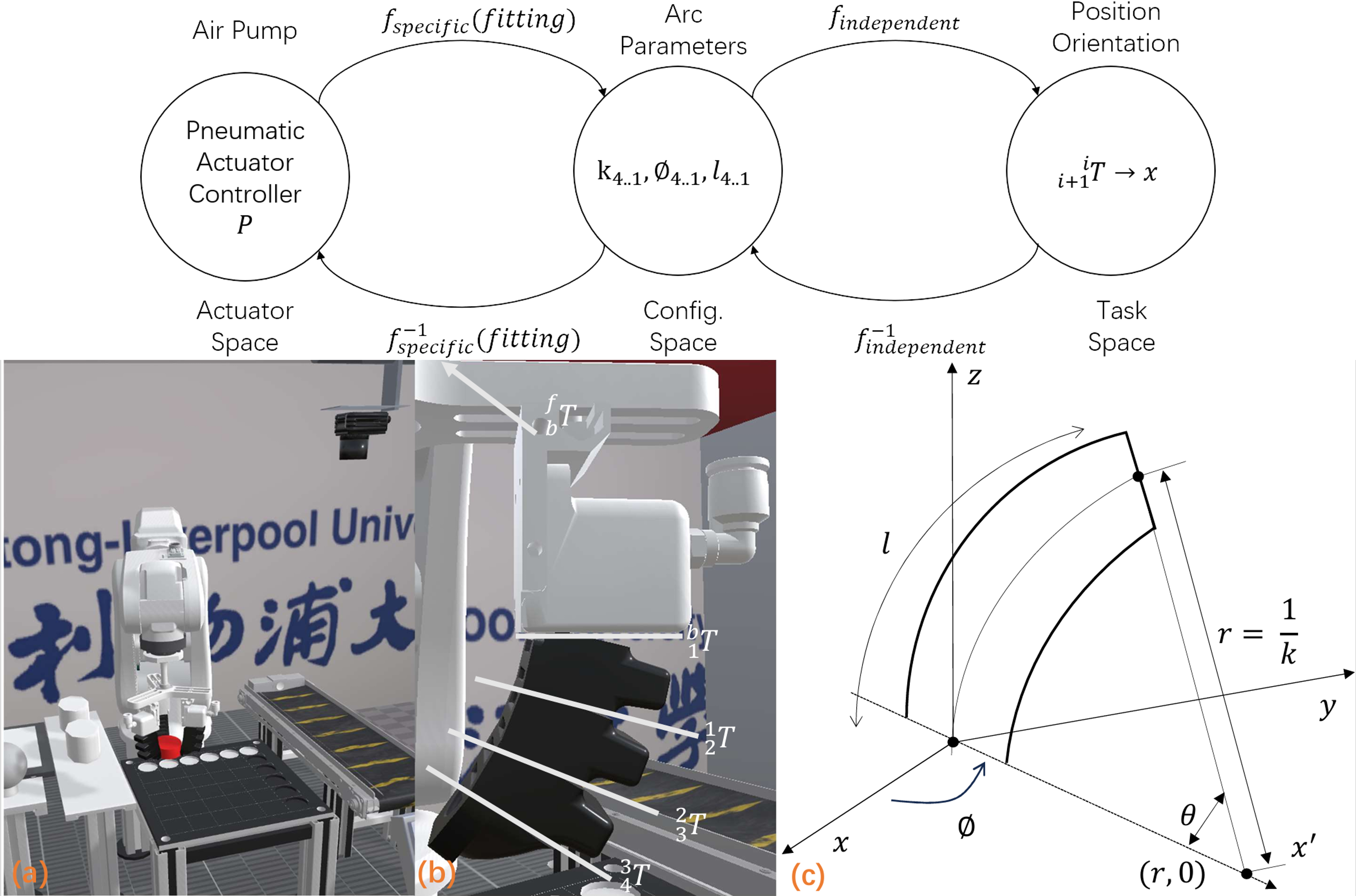
"A Novel Approach to Grasping Control of Soft Robotic Grippers based on Digital Twin"
Tianyi Xiang, Borui Li, Quan Zhang, March Leach, Enggee Lim
29th International Conference on Automation and Computing (ICAC 2024).
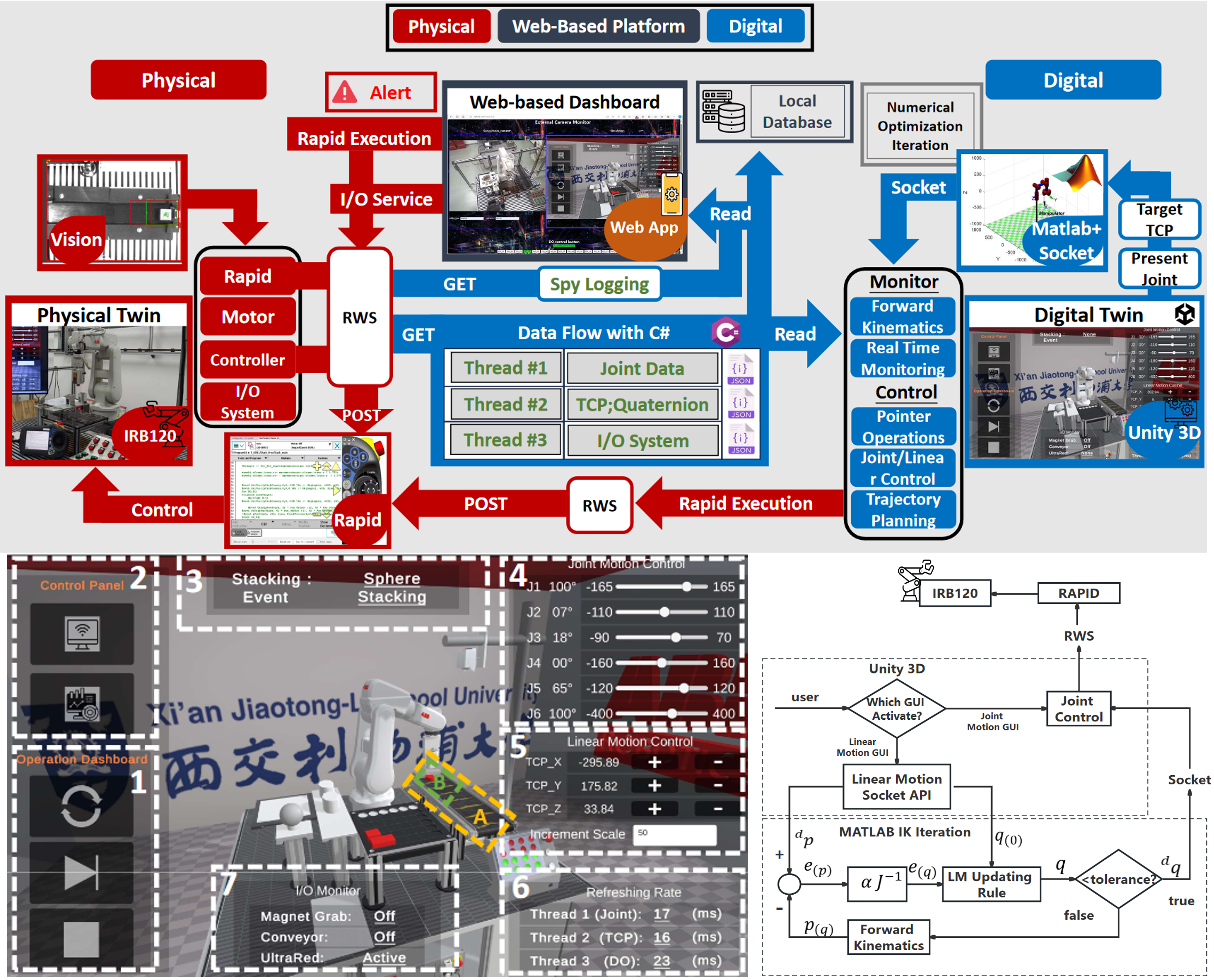
"Development of a Simple and Novel Digital Twin Framework for Industrial Robots in Intelligent Robotics Manufacturing"
Tianyi Xiang, Borui Li, Xiaonan Pan, Quan Zhang
20th International Conference on Automation Science and Engineering (CASE 2024).
Projects Video & Pictures
An reproduction of pi0 VLM: Cloth folding
A differentiable particle based simulator with gaussian splatting rendering
Inversely constructed of paper: Physically Embodied Gaussian Splatting: A Visually Learnt and Physically Grounded 3D Representation for Robotics
Github Link: https://github.com/Tianyi20/pdb_demo
Real-to-Sim via End-to-End Differentiable Simulation and Rendering
Liquid Manipulation: Category-level pose & dimension detector with pouring action optimizer
Forked PDDLstream Task and Motion planning (TAMP) online replanning.
(simulation forked from Caelan Reed Garrett LTAMP)
Behaviour cloning (BC) learning-based Block Pushing task
Vision-learning based Soft Actuator Grasping Control within Digital Twin
Simple and Novel Motion Planning Digital Twin Framework for Industrial Robot
Autonomous tracking DIY Mars Rover Design
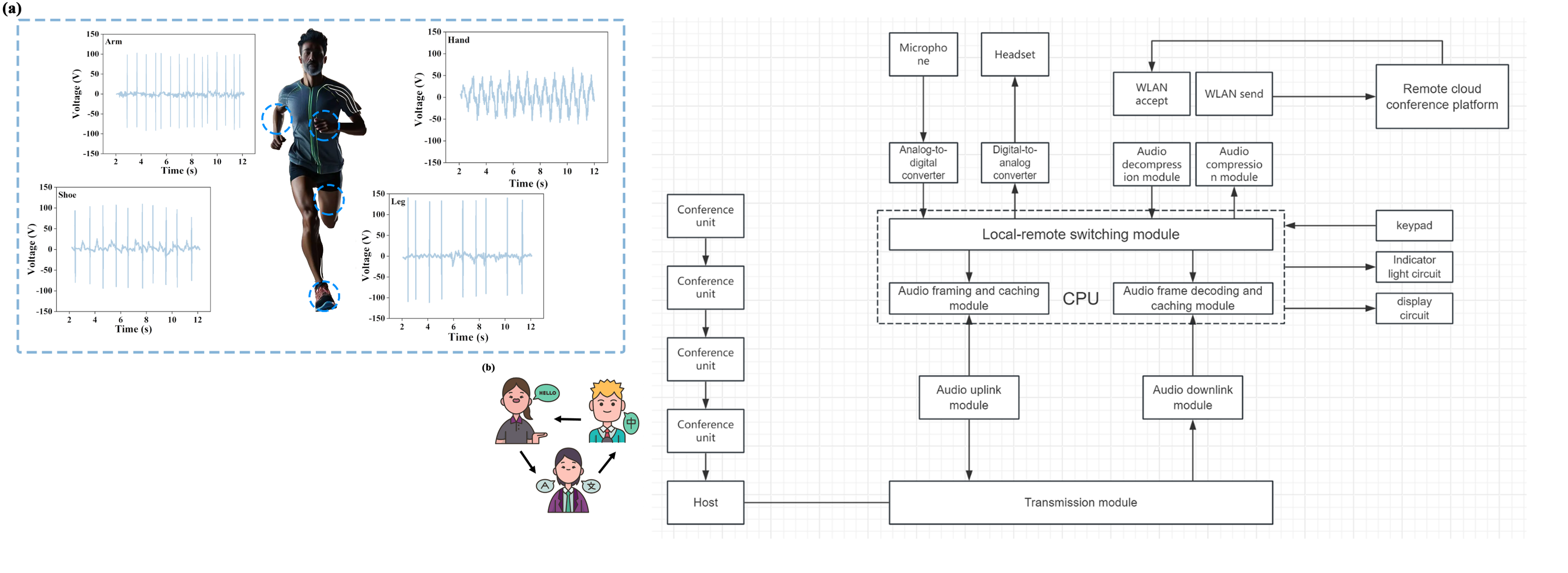
Tactile Sensing achieving human motion monitoring
ROS SLAM AGV navigation with Adaptive Monte Carlo Localization (AMCL)
AGV with PLC control optimisation simulation